The Role of Earth Observation in an Integrated Deprived Area Mapping “System” for Low-to-Middle Income Countries

 ,
,  , , , , , and
, , , , , and
Abstract
:
1. Introduction
2. The Design of an Integrated Deprived Area Mapping System (IDeAMapS)
2.1. Requirements for Deprived Area Mapping
- Relating to area physical characteristics: Deprived areas are characterized by their morphology in the urban environment. Physical indicators of such areas reflect building characteristics such as their size, shape, and height; road and other access networks; building density; settlement shape; settlement location with respect to environmental features such as public green or blue spaces, steep slopes, and flood zones; and neighborhood characteristics such as proximity to railways and high-voltage power lines [9].
- Relating to area social characteristics: Deprived areas are characterized by a wide range of features in their social environment, which are influenced by policies, regulations, and practices (such as tenure or waste management). Social indicators of deprived areas include the presence of crime; proximity and accessibility to schools, health facilities, shops, jobs, and public infrastructure; and social capital derived from community-based organizations and among neighbors with shared identities [8].
- Context-dependent: The physical and social characteristics of deprived areas differ across cities and countries and even within one neighborhood [10]. Furthermore, such areas are not static. The characteristics that define deprived areas at particular moments in time may alter due to changes in local, national, and global factors [5,12].
- Comparable across cities and countries: To adequately support national planning activities and programs, and to be used in global initiatives such as the SDGs, there must be consistency in deprived area definitions across cities and countries [23]. This is meant to set the basic requirements for data on deprived areas.
- Updated frequently with timely data: Deprived areas are highly dynamic and can change fast [75]. Common transition processes relate to development stages, i.e., from low-density infant settlements to high-density saturated neighborhoods, sudden major shifts in population due to demolitions or rapid growth, locational dynamics of temporary settlements, or deprived areas transformed into nondeprived after successful upgrading. Therefore, frequent updates to deprived area maps are necessary [76].
- Protective of individual privacy and vulnerable populations: Given the relatively high spatio-temporal resolution of deprived area maps, individual and group privacy in all published data, as well as transparency in the methods used, should be ensured. There may also be a need to selectively mask the most vulnerable deprived areas or blur their boundaries [74].
- Developed in an inclusive multi-stakeholder process: The existence of deprived areas reflects a story of social inequality, exclusion, and/or oppression. Urban deprivation does not emerge at random, and their transition into a place that is “inclusive, safe, resilient, and sustainable” requires addressing the policies and social attitudes that caused its establishment. This requires the involvement of communities and authorities, both locally and nationally [77].
2.2. Current Approaches to Deprived Area Mapping
2.2.1. Aggregated Slum Households Approach
2.2.2. Field-Based Mapping
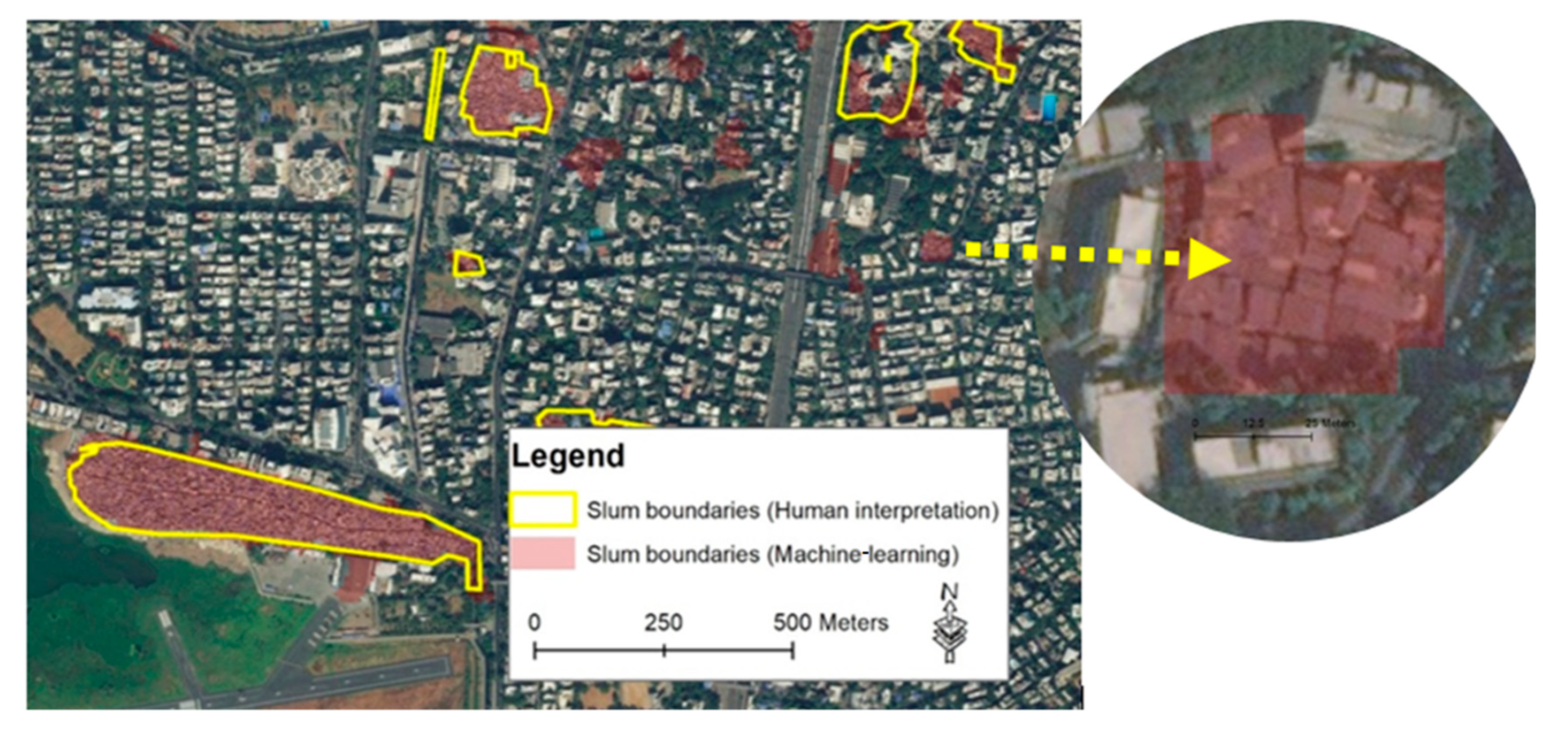
2.2.3. Human Imagery Classification Approach
2.2.4. Semi-Automatic Imagery Classification Approach
2.3. Comparison of the Existing Deprived Area Mapping Approaches
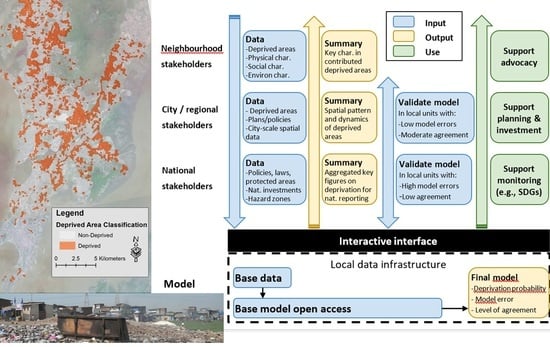
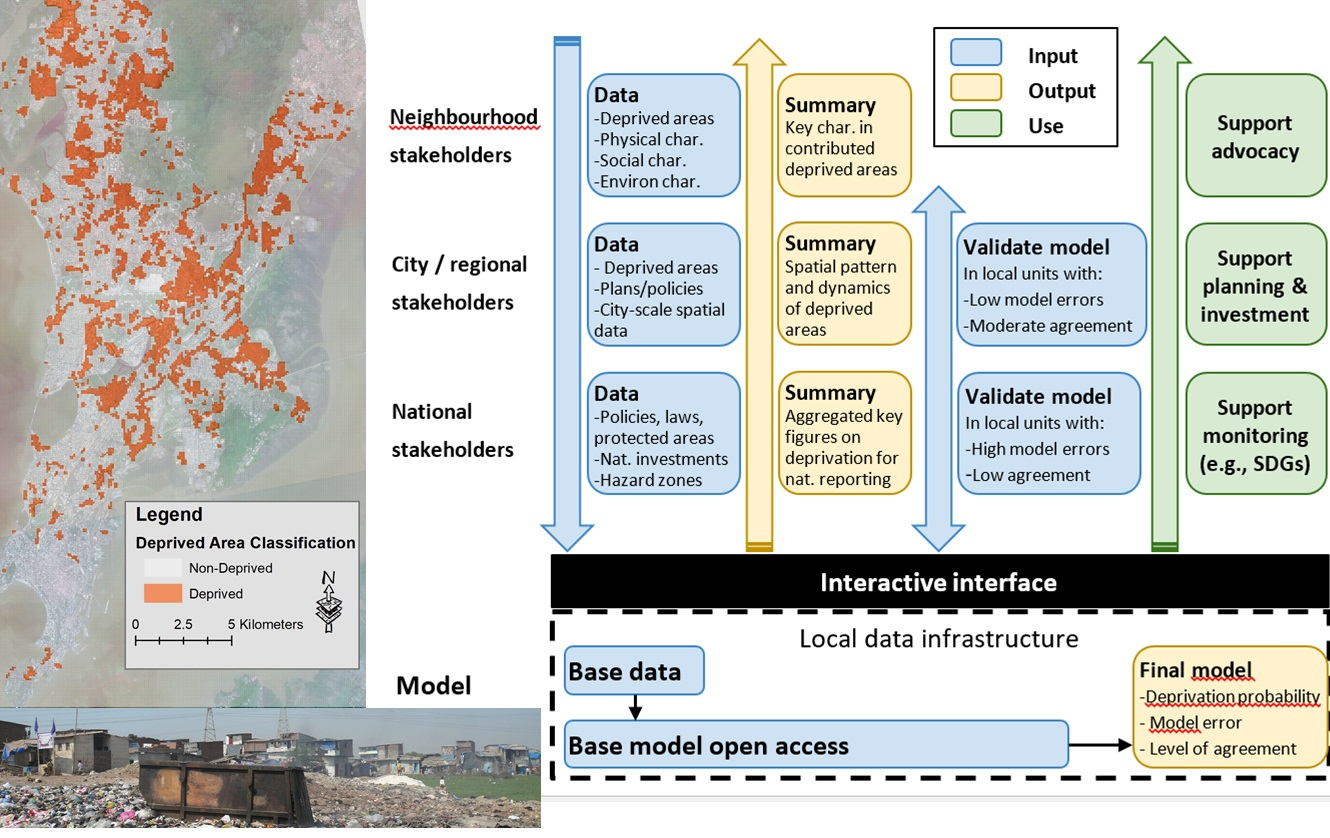
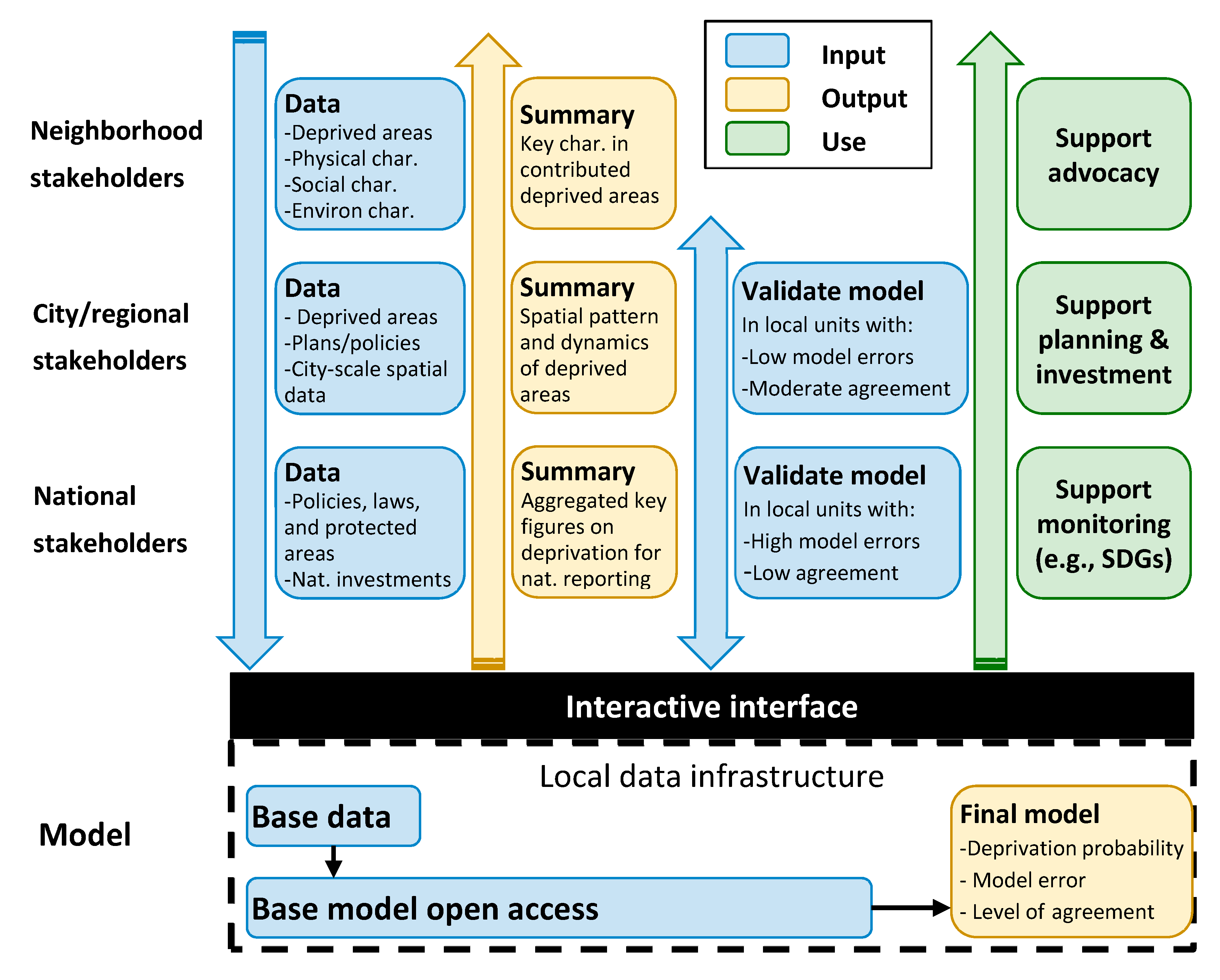
2.4. The Proposed IDeAMapS Framework
3. The Role of Earth Observation for the Design of an Integrated Deprived Area Mapping System
3.1. The Most Promising Machine-Learning Methods towards an Integrated Deprived Area Mapping System
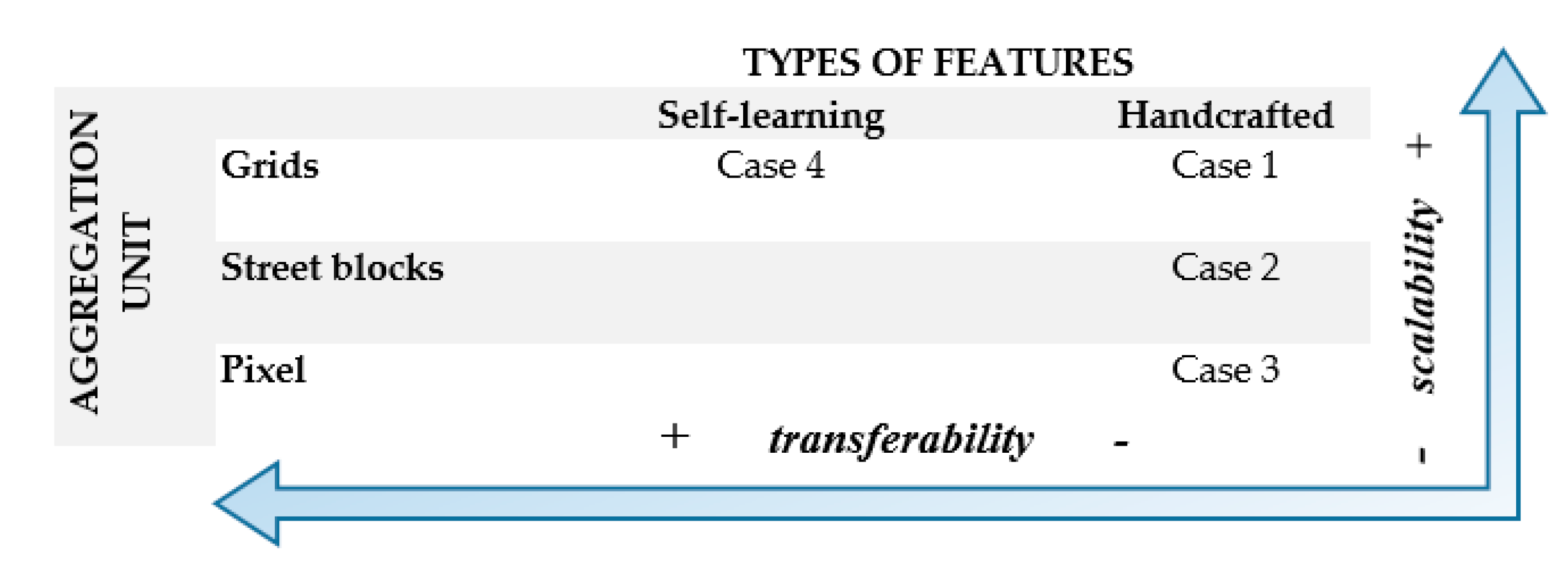
3.2. Example Cases of Machine Learning for Deprived Area Mapping
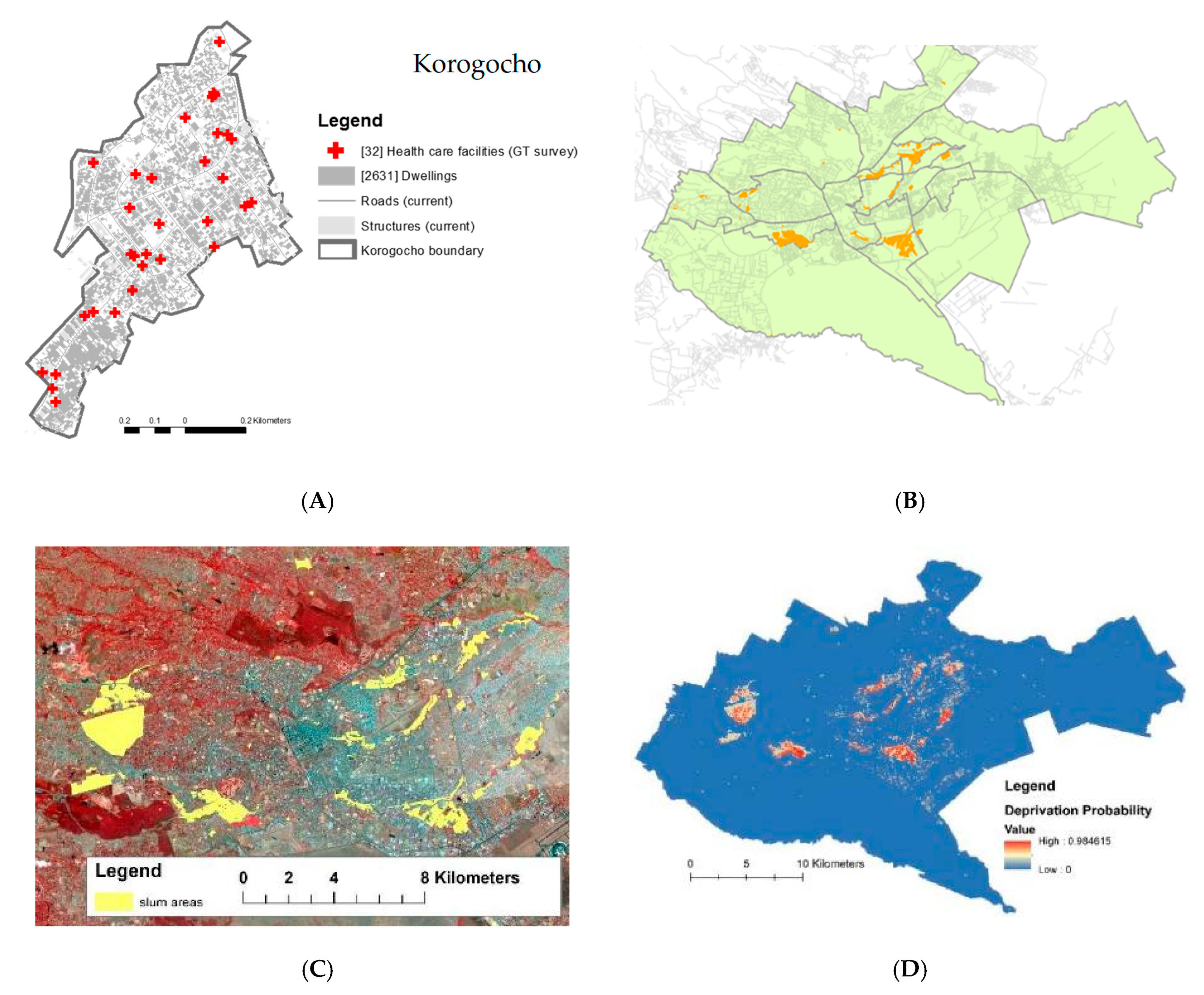
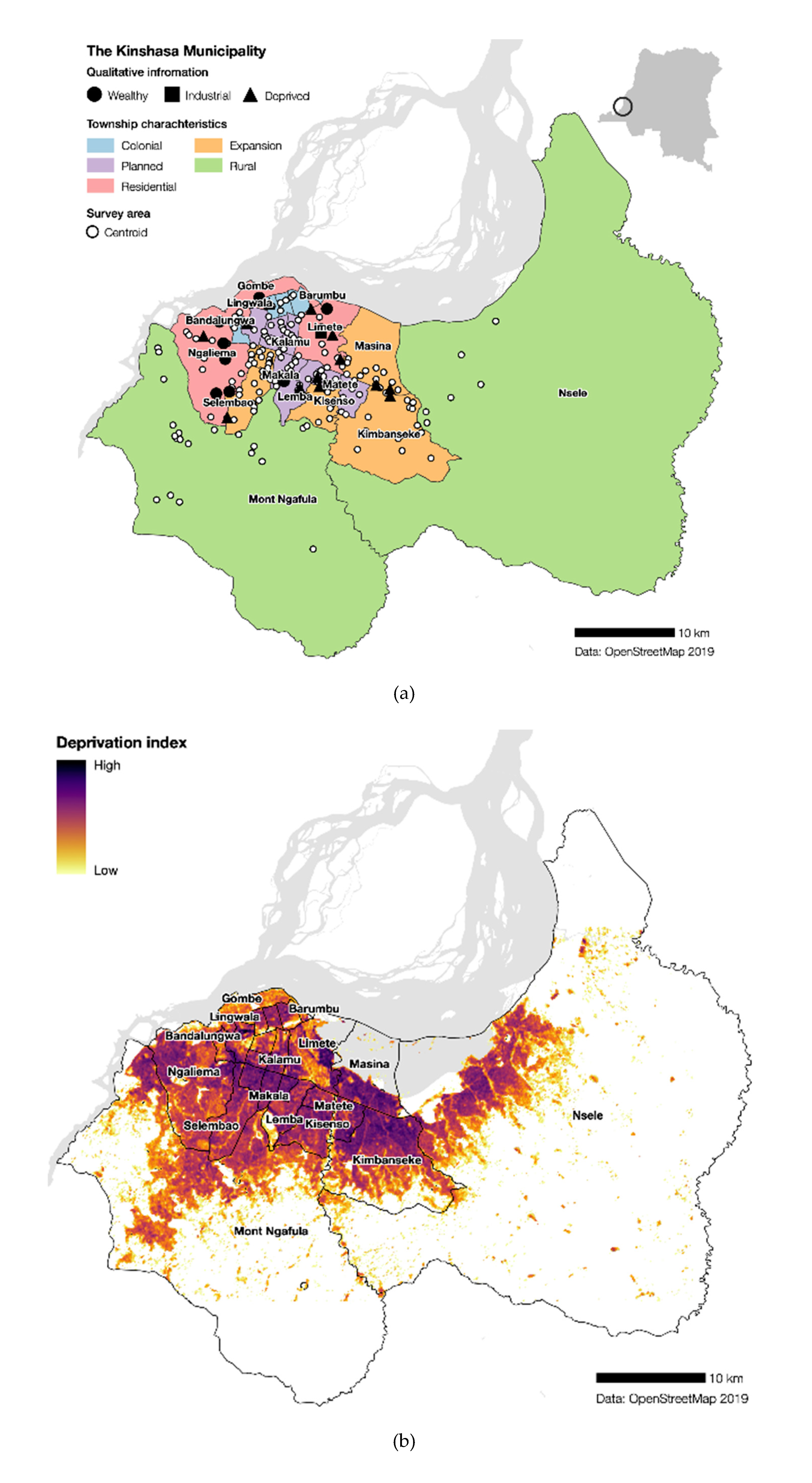
3.2.1. The Potential of High-Resolution Gridded Datasets to Map Deprived Areas (Case 1)
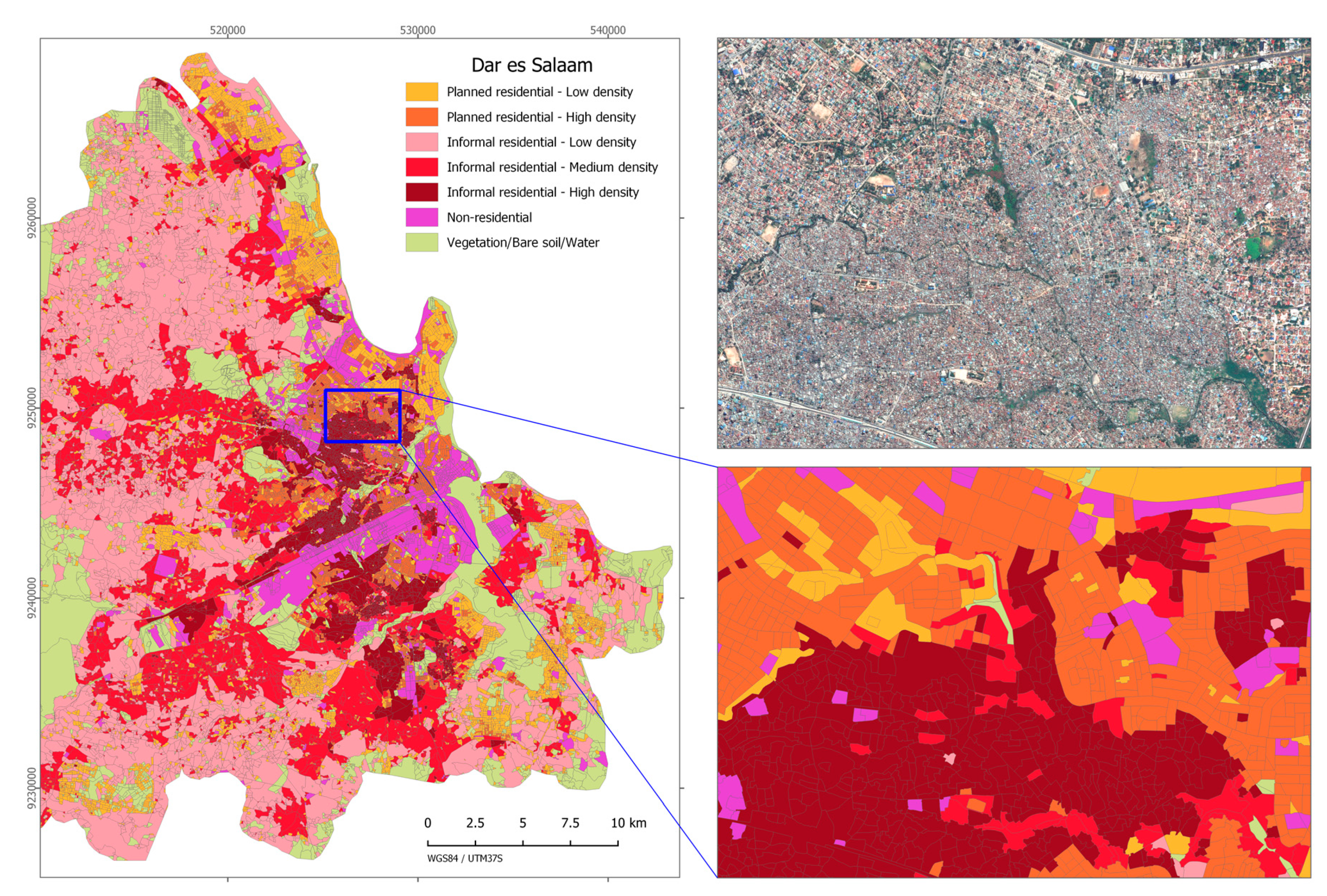
3.2.2. The Potential of OBIA for Generating Land Cover Information and Mapping Deprived Areas at City-Block Level (Case 2)
3.2.3. Contextual Features for Mapping Deprived Areas (Case 3)
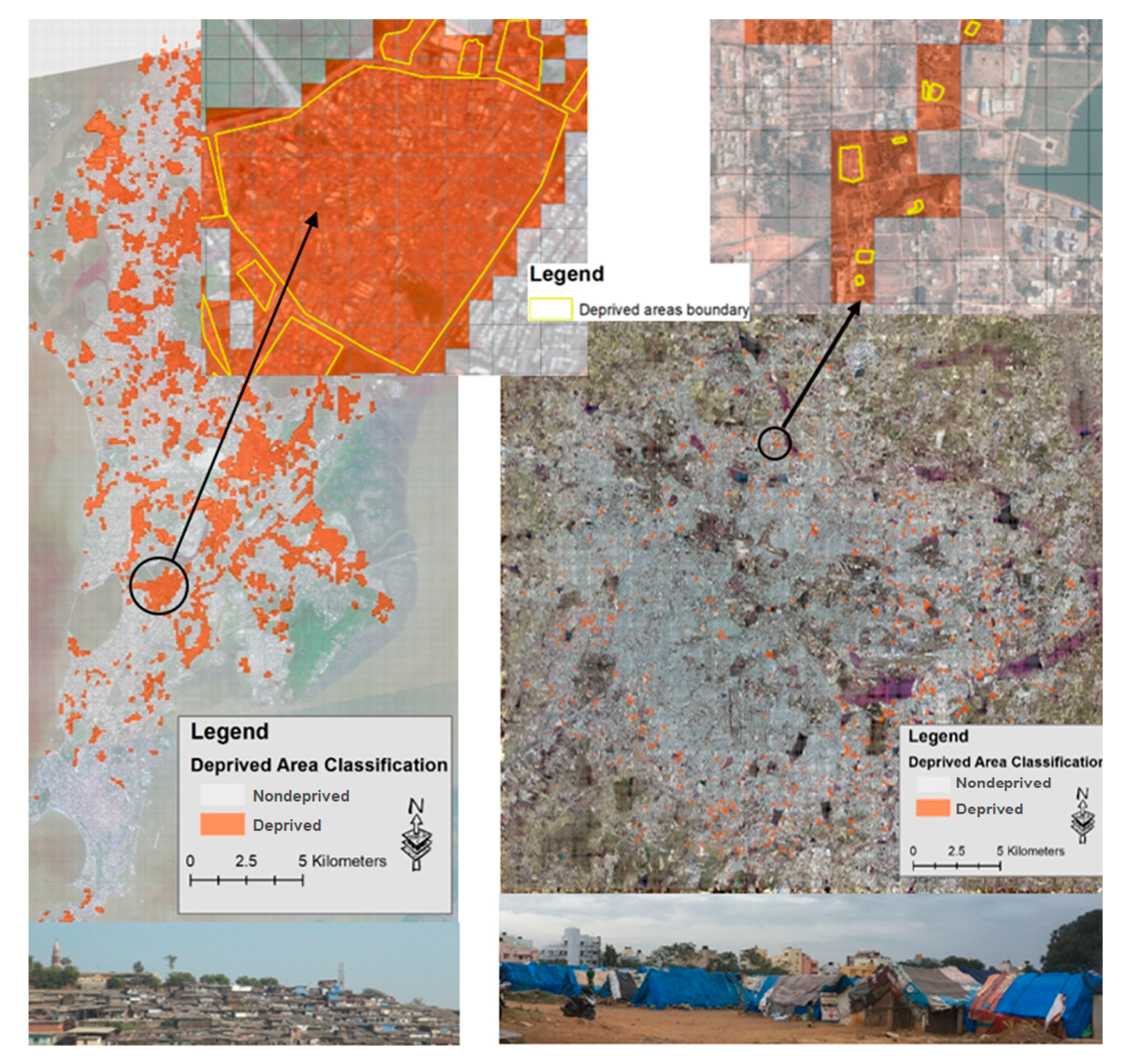
3.3. Deep Learning for Mapping Deprived Areas (Case 4)
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Almanac, S. Tracking Improvement in the Lives of Slum Dwellers; UN-Habitat. UNION, Publishing Services Section: Nairobi, Kenya, 2015. [Google Scholar]
- Heilig, G.K. World Urbanization Prospects; the 2018 Revision; United Nations, Department of Economic and Social Affairs (DESA), Population Division, Population Estimates and Projections Section: New York, NY, USA, 2019. [Google Scholar]
- UN Department of Economic and Social Affairs Population Division. World Urbanization Prospects; 2014 Revision; United Nations: New York, NY, USA, 2014. [Google Scholar]
- UN-Habitat; UN Statistics Division; Cities Alliance. Secure Tenure, Slums and Global Sample of Cities. In Proceedings of the Expert Group Meeting on Urban Indicators, Nairobi, Kenya, 28–30 October 2002. [Google Scholar]
- Sliuzas, R.; Mboup, G.; de Sherbinin, A. Report of the Expert Group Meeting on Slum Identification and Mapping; CIESIN, UN-Habitat, ITC: Enschede, The Netherlands, 2008. [Google Scholar]
- UN-Habitat. Distinguishing Slum from Non-Slum Areas to Identify Occupants’ Issues. Available online: https://unhabitat.org/distinguishing-slum-from-non-slum-areas-to-identify-occupants-issues/ (accessed on 7 December 2017).
- Mahabir, R.; Crooks, A.; Croitoru, A.; Agouris, P. The study of slums as social and physical constructs: Challenges and emerging research opportunities. Reg. Stud. Reg. Sci. 2016, 3, 399–419. [Google Scholar] [CrossRef] [Green Version]
- Lilford, R.; Kyobutungi, C.; Ndugwa, R.; Sartori, J.; Watson, S.I.; Sliuzas, R.; Kuffer, M.; Hofer, T.; Porto de Albuquerque, J.; Ezeh, A. Because space matters: Conceptual framework to help distinguish slum from non-slum urban areas. BMJ Glob. Health 2019, 4, e001267. [Google Scholar] [CrossRef] [PubMed]
- Kohli, D.; Sliuzas, R.V.; Kerle, N.; Stein, A. An ontology of slums for image-based classification. Comput. Environ. Urban Syst. 2012, 36, 154–163. [Google Scholar] [CrossRef]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R. Slums from space—15 years of slum mapping using remote sensing. Remote Sens. 2016, 8, 455. [Google Scholar] [CrossRef] [Green Version]
- Kuffer, M.; Barros, J.; Sliuzas, R. The development of a morphological unplanned settlement index using very-high-resolution (VHR) imagery. Comput. Environ. Urban Syst. 2014, 48, 138–152. [Google Scholar] [CrossRef]
- Mahabir, R.; Croitoru, A.; Crooks, A.; Agouris, P.; Stefanidis, A. A critical review of high and very high-resolution remote sensing approaches for detecting and mapping slums: Trends, challenges and emerging opportunities. Urban Sci. 2018, 2, 8. [Google Scholar] [CrossRef] [Green Version]
- Nuissl, H.; Heinrichs, D. Slums: Perspectives on the definition, the appraisal and the management of an urban phenomenon. DIE ERDE J. Geogr. Soc. Berl. 2013, 144, 105–116. [Google Scholar]
- UN-Habitat. Slums: Some Definitions. Available online: http://mirror.unhabitat.org/documents/media_centre/sowcr2006/SOWCR (accessed on 22 March 2018).
- UN-Habitat. Slums of the World: The Face of Urban Poverty in the New Millennium; UN-HABITAT: Nairobi, Kenya, 2003; p. 90. [Google Scholar]
- Snyder, R.E.; Jaimes, G.; Riley, L.W.; Faerstein, E.; Corburn, J. A Comparison of Social and Spatial Determinants of Health between Formal and Informal Settlements in a Large Metropolitan Setting in Brazil. J. Urban Health 2014, 91, 432–445. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fink, G.; Günther, I.; Hill, K. Slum residence and child health in developing countries. Demography 2014, 51, 1175–1197. [Google Scholar] [CrossRef]
- Patel, A.; Koizumi, N.; Crooks, A. Measuring slum severity in Mumbai and Kolkata: A household-based approach. Habitat Int. 2014, 41, 300–306. [Google Scholar] [CrossRef]
- Engstrom, R.; Ofiesh, C.; Rain, D.; Jewell, H.; Weeks, J.R. Defining neighborhood boundaries for urban health research in developing countries: A case study of Accra, Ghana. J. Maps 2013, 9, 36–42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- UN-Habitat. Urban Inequities Report: Addis Ababa; UNON Publishing Services Section: Addis Ababa, Ethiopia, 2004. [Google Scholar]
- Lemma, T.; Sliuzas, R.; Kuffer, M. Participatory Approach to Monitoring Slum Conditions: An Example from Ethiopia. In Mapping for Change: Practice, Technologies and Communication: Proceedings of the International Conference on Participatory Spatial Information Management and Communication; Rambaldi, G., Corbett, J., Olson, R., McCall, M., Muchemi, J., Kyem, P., Weiner, D., Chambers, R., Eds.; IIED: London, UK, 2006; Volume 54, pp. 58–66. [Google Scholar]
- Brito, P.L.; Arenas, H.; Lam, N.; Quintanilha, J.A. Recognition of urban patterns related to leptospirosis contamination risks using object based classification of aerial photography. Test areas: Informal settlements of the railroad suburb of salvador, Brazil. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 8–11 July 2008; Volume 1, pp. I272–I275. [Google Scholar]
- Ezeh, A.; Oyebode, O.; Satterthwaite, D.; Chen, Y.-F.; Ndugwa, R.; Sartori, J.; Mberu, B.; Melendez-Torres, G.J.; Haregu, T.; Watson, S.I.; et al. The history, geography, and sociology of slums and the health problems of people who live in slums. Lancet 2017, 389, 547–558. [Google Scholar] [CrossRef]
- Mishra, S.; Kuffer, M.; Martinez, J.; Pfeffer, K. An Exploration of Environmental Quality in the context of Multiple Deprivations: The Case of Kalyan-Dombivli, India. In GIS in Sustainable Urban Planning and Management: A Global Perspective; van Maarseveen, M., Martinez, J., Flacke, J., Eds.; Taylor & Francis, CRC Press: Boca Raton, FL, USA, 2018; pp. 45–62. [Google Scholar]
- Georganos, S.; Gadiaga, A.N.; Linard, C.; Grippa, T.; Vanhuysse, S.; Mboga, N.; Wolff, E.; Dujardin, S.; Lennert, M. Modelling the Wealth Index of Demographic and Health Surveys within Cities Using Very High-Resolution Remotely Sensed Information. Remote Sens. 2019, 11, 2543. [Google Scholar] [CrossRef] [Green Version]
- UNFPA. UNFPA Strategy for the 2020 Round of Population & Housing Censuses (2015–2024): Because Everyone Counts; UNFPA Inter-Divisional Working Group on Census (IDWG-Census): New York, NY, USA, 2017. [Google Scholar]
- United Nations Statistics Division. The Sustainable Development Goals Report. 2018. Available online: https://unstats.un.org/sdgs/report/2018/overview/ (accessed on 9 December 2019).
- Andries, A.; Morse, S.; Murphy, R.; Lynch, J.; Woolliams, E.; Fonweban, J. Translation of Earth observation data into sustainable development indicators: An analytical framework. Sustain. Dev. 2019, 27, 366–376. [Google Scholar] [CrossRef] [Green Version]
- SDG Knowledge Platform. Sustainable Development Goal 11. Available online: https://sustainabledevelopment.un.org/sdg11 (accessed on 29 June 2019).
- Angeles, G.; Lance, P.; Barden-O’Fallon, J.; Islam, N.; Mahbub, A.Q.M.; Nazem, N.I. The 2005 census and mapping of slums in Bangladesh: Design, select results and application. Int. J. Health Geogr. 2009, 8, 19. [Google Scholar] [CrossRef] [Green Version]
- Pedro, A.A.; Queiroz, A.P. Slum: Comparing municipal and census basemaps. Habitat Int. 2019, 83, 30–40. [Google Scholar] [CrossRef]
- Carr-Hill, R. Missing millions and measuring development progress. World Dev. 2013, 46, 30–44. [Google Scholar] [CrossRef]
- Lucci, P.; Bhatkal, T.; Khan, A. Are we underestimating urban poverty? World Dev. 2018, 103, 297–310. [Google Scholar] [CrossRef]
- Elsey, H.; Thomson, D.R.; Lin, R.Y.; Maharjan, U.; Agarwal, S.; Newell, J. Addressing Inequities in Urban Health: Do Decision-Makers Have the Data They Need? Report from the Urban Health Data Special Session at International Conference on Urban Health Dhaka 2015. J. Urban Health Bull. N. Y. Acad. Med. 2016, 93, 526–537. [Google Scholar] [CrossRef] [Green Version]
- Kuffer, M.; Orina, F.; Sliuzas, R.; Taubenböck, H. Spatial patterns of slums: Comparing African and Asian cities. In Proceedings of the Joint urban remote sensing event (JURSE), Dubai, UAE, 6–8 March 2017. [Google Scholar]
- Gruebner, O.; Sachs, J.; Nockert, A.; Frings, M.; Khan, M.H.; Lakes, T.; Hostert, P. Mapping the slums of Dhaka from 2006 to 2010. Dataset Pap. Sci. 2014, 2014, 172182. [Google Scholar] [CrossRef] [Green Version]
- Kohli, D.; Sliuzas, R.; Stein, A. Urban slum detection using texture and spatial metrics derived from satellite imagery. J. Spat. Sci. 2016, 61, 405–426. [Google Scholar] [CrossRef] [Green Version]
- Stow, D.A.; Lopez, A.; Lippitt, C.; Hinton, S.; Weeks, J. Object-based classification of residential land use within Accra, Ghana based on QuickBird satellite data. Int. J. Remote Sens. 2007, 28, 5167–5173. [Google Scholar] [CrossRef] [PubMed]
- Weeks, J.R.; Getis, A.; Stow, D.A.; Hill, A.G.; Rain, D.; Engstrom, R.; Stoler, J.; Lippitt, C.; Jankowska, M.; Lopez-Carr, A.C.; et al. Connecting the dots between health, poverty, and place in Accra, Ghana. Ann. Assoc. Am. Geogr. 2012, 102, 932–941. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Twigg, J. Disaster Risk Reduction; Overseas Development Institute: London, UK, 2015. [Google Scholar]
- Bramante, J.F.; Raju, D.K. Predicting the distribution of informal camps established by the displaced after a catastrophic disaster, Port-au-Prince, Haiti. Appl. Geogr. 2013, 40, 30–39. [Google Scholar] [CrossRef]
- Abbott, J. The use of GIS in informal settlement upgrading: Its role and impact on the community and on local government. Habitat Int. 2003, 27, 575–593. [Google Scholar] [CrossRef]
- Shekhar, S. Improving the slum planning through geospatial decision support system. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-2, 99–105. [Google Scholar] [CrossRef] [Green Version]
- Chitekwe-Biti, B.; Mudimu, P.; Nyama, G.M.; Jera, T. Developing an informal settlement upgrading protocol in Zimbabwe—The Epworth story. Environ. Urban. 2012, 24, 131–148. [Google Scholar] [CrossRef] [Green Version]
- Bakibinga, P.; Kabaria, C.; Kyobutungi, C.; Manyara, A.; Mbaya, N.; Mohammed, S.; Njeri, A.; Azam, I.; Iqbal, R.; Mazaffar, S.; et al. A protocol for a multi-site, spatially-referenced household survey in slum settings: Methods for access, sampling frame construction, sampling, and field data collection. BMC Med. Res. Methodol. 2019, 19, 109. [Google Scholar]
- Makau, J.; Dobson, S.; Samia, E. The five-city enumeration: The role of participatory enumerations in developing community capacity and partnerships with government in Uganda. Environ. Urban. 2012, 24, 31–46. [Google Scholar] [CrossRef]
- Beukes, A. Making the Invisible Visible: Generating Data on ‘Slums’ at Local, City and Global Scales; International Institute for Environment and Development: London, UK, 2015. [Google Scholar]
- Baud, I.; Kuffer, M.; Pfeffer, K.; Sliuzas, R.V.; Karuppannan, S. Understanding heterogeneity in metropolitan India: The added value of remote sensing data for analyzing sub-standard residential areas. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 359–374. [Google Scholar] [CrossRef]
- Anurogo, W.; Lubis, M.Z.; Pamungkas, D.S.; Hartono; Ibrahim, F.M. A Spatial Approach to Identify Slum Areas in East Wara Sub-Districts, South Sulawesi. IOP Conf. Ser. Earth Environ. Sci. 2017, 98, 012030. [Google Scholar] [CrossRef] [Green Version]
- Duque, J.C.; Patino, J.E.; Betancourt, A. Exploring the Potential of Machine Learning for Automatic Slum Identification from VHR Imagery. Remote Sens. 2017, 9, 895. [Google Scholar] [CrossRef] [Green Version]
- Leonita, G.; Kuffer, M.; Sliuzas, R.; Persello, C. Machine Learning-Based Slum Mapping in Support of Slum Upgrading Programs: The Case of Bandung City, Indonesia. Remote Sens. 2018, 10, 1522. [Google Scholar] [CrossRef] [Green Version]
- Verma, D.; Jana, A.; Ramamritham, K. Transfer learning approach to map urban slums using high and medium resolution satellite imagery. Habitat Int. 2019, 88, 101981. [Google Scholar] [CrossRef]
- Mboga, N.O.; Persello, C.; Bergado, J.; Stein, A. Detection of informal settlements from VHR images using Convolutional Neural Networks. Remote Sens. 2017, 9, 1106. [Google Scholar] [CrossRef] [Green Version]
- Ansari, R.A.; Buddhiraju, K.M. Textural segmentation of remotely sensed images using multiresolution analysis for slum area identification. Eur. J. Remote Sens. 2019, 52, 74–88. [Google Scholar] [CrossRef] [Green Version]
- Fallatah, A.; Jones, S.; Mitchell, D. Object-based random forest classification for informal settlements identification in the Middle East: Jeddah a case study. Int. J. Remote Sens. 2020, 41, 4421–4445. [Google Scholar] [CrossRef]
- Wurm, M.; Stark, T.; Zhu, X.X.; Weigand, M.; Taubenböck, H. Semantic segmentation of slums in satellite images using transfer learning on fully convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2019, 150, 59–69. [Google Scholar] [CrossRef]
- Prabhu, R.; Alagu Raja, R.A. Urban Slum Detection Approaches from High-Resolution Satellite Data Using Statistical and Spectral Based Approaches. J. Ind. Soc. Remote Sens. 2018, 46, 2033–2044. [Google Scholar] [CrossRef]
- Schmitt, A.; Sieg, T.; Wurm, M.; Taubenböck, H. Investigation on the separability of slums by multi-aspect TerraSAR-X dual-co-polarized high resolution spotlight images based on the multi-scale evaluation of local distributions. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 181–198. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Huang, X.; Liu, H. Unsupervised Deep Feature Learning for Urban Village Detection from High-Resolution Remote Sensing Images. Photogramm. Eng. Remote Sens. 2017, 83, 567–579. [Google Scholar] [CrossRef]
- Wang, J.; Kuffer, M.; Pfeffer, K. The role of spatial heterogeneity in detecting urban slums. Comput. Environ. Urban Syst. 2019, 73, 95–107. [Google Scholar] [CrossRef]
- Ajami, A.; Kuffer, M.; Persello, C.; Pfeffer, K. Identifying a Slums’ Degree of Deprivation from VHR Images Using Convolutional Neural Networks. Remote Sens. 2019, 11, 1282. [Google Scholar] [CrossRef] [Green Version]
- Dahiya, S.; Garg, P.K.; Jat, M.K. Automated Extraction of Slum Built-up Areas from Multispectral Imageries. J. Ind. Soc. Remote Sens. 2019, 48, 113–119. [Google Scholar] [CrossRef]
- Taubenböck, H.; Kraff, N.J.; Wurm, M. The morphology of the arrival city—A global categorization based on literature surveys and remotely sensed data. Appl. Geogr. 2018, 92, 150–167. [Google Scholar] [CrossRef]
- Ranguelova, E.; Weel, B.; Roy, D.; Kuffer, M.; Pfeffer, K.; Lees, M. Image based classification of slums, built-up and non-built-up areas in Kalyan and Bangalore, India. Eur. J. Remote Sens. 2018, 52 (Suppl. 1), 40–61. [Google Scholar] [CrossRef] [Green Version]
- Badmos, O.S.; Rienow, A.; Callo-Concha, D.; Greve, K.; Jürgens, C. Urban development in West Africa—Monitoring and intensity analysis of slum growth in Lagos: Linking pattern and process. Remote Sens. 2018, 10, 1044. [Google Scholar] [CrossRef] [Green Version]
- Kuffer, M.; Wang, J.; Nagenborg, M.; Pfeffer, K.; Kohli, D.; Sliuzas, R.; Persello, C. The Scope of Earth-Observation to Improve the Consistency of the SDG Slum Indicator. ISPRS Int. J. Geoinf. 2018, 7, 428. [Google Scholar] [CrossRef] [Green Version]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Queiroz Feitosa, R.; van der Meer, F.; van der Werff, H.; van Coillie, F.; et al. Geographic object-based image analysis—Towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [Green Version]
- Pratomo, J.; Kuffer, M.; Kohli, D.; Martinez, J. Application of the trajectory error matrix for assessing the temporal transferability of OBIA for slum detection. Eur. J. Remote Sens. 2018, 51, 838–849. [Google Scholar] [CrossRef] [Green Version]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R.; Baud, I. Extraction of slum areas from VHR imagery using GLCM variance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1830–1840. [Google Scholar] [CrossRef]
- Wang, J.; Kuffer, M.; Roy, D.; Pfeffer, K. Deprivation pockets through the lens of convolutional neural networks. Remote Sens. Environ. 2019, 234, 111448. [Google Scholar] [CrossRef]
- Thomson, D.; Kuffer, M.; Boo, G.; Hati, B.; Grippa, T.; Elsey, H.; Linard, C.; Mahabir, R.; Kyobutungi, C.; Mulandi, J.; et al. Critical Commentary: Need for an Integrated Deprived Area “Slum” Mapping System (IDeAMapS) in LMICs; In Preprints; MDPI: Basel, Switzerland, 2019. [Google Scholar]
- Mahabir, R.; Agouris, P.; Stefanidis, A.; Croitoru, A.; Crooks, A.T. Detecting and mapping slums using open data: A case study in Kenya. Int. J. Digit. Earth 2018, 1–25. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Thomson, D.R.; Linard, C.; Vanhuysse, S.; Steele, J.E.; Shimoni, M.; Siri, J.; Caiaffa, W.T.; Rosenberg, M.; Wolff, E.; Grippa, T.; et al. Extending Data for Urban Health Decision-Making: A Menu of New and Potential Neighborhood-Level Health Determinants Datasets in LMICs. J. Urban Health 2019, 96, 514–536. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, R.; Kuffer, M.; Persello, C. The Temporal Dynamics of Slums Employing a CNN-Based Change Detection Approach. Remote Sens. 2019, 11, 2844. [Google Scholar] [CrossRef] [Green Version]
- Sliuzas, R.; Kuffer, M.; Masser, I. The Spatial and Temporal Nature of Urban Objects. In Remote Sensing of Urban and Suburban Areas; Rashed, T., Jürgens, C., Eds.; Springer: Dordrecht, The Netherlands, 2010; Volume 10, pp. 67–84. [Google Scholar]
- Corburn, J.; Cohen, A.K. Why We Need Urban Health Equity Indicators: Integrating Science, Policy, and Community. PLoS Med. 2012, 9, e1001285. [Google Scholar] [CrossRef]
- Lilford, R.J.; Oyebode, O.; Satterthwaite, D.; Melendez-Torres, G.J.; Chen, Y.-F.; Mberu, B.; Watson, S.I.; Sartori, J.; Ndugwa, R.; Caiaffa, W.; et al. Improving the health and welfare of people who live in slums. Lancet 2017, 389, 559–570. [Google Scholar] [CrossRef]
- Christ, K.; Baier, K.; Azzam, R. Slums and informal housing in India: A critical look at official statistics with regard to water and sanitation. Water Int. 2016, 41, 308–324. [Google Scholar] [CrossRef]
- Friesen, J.; Taubenböck, H.; Wurm, M.; Pelz, P.F. The similar size of slums. Habitat Int. 2018, 73, 79–88. [Google Scholar] [CrossRef]
- Openshaw, S. The Modifiable Areal Unit Problem; Geo Books: Norwich, UK, 1984. [Google Scholar]
- UN-Habitat. The Challenge of Slums: Global Report on Human Settlements 2003; Earthscan Publications Ltd.: London, UK; Sterling, VA, USA, 2003. [Google Scholar]
- Wardrop, N.A.; Jochem, W.C.; Bird, T.J.; Chamberlain, H.R.; Clarke, D.; Kerr, D.; Bengtsson, L.; Juran, S.; Seaman, V.; Tatem, A.J. Spatially disaggregated population estimates in the absence of national population and housing census data. Proc. Natl. Acad. Sci. USA 2018, 115, 3529. [Google Scholar] [CrossRef] [Green Version]
- Baud, I.; Pfeffer, K.; Sridharan, N.; Nainan, N. Matching deprivation mapping to urban governance in three Indian mega-cities. Habitat Int. 2009, 33, 365–377. [Google Scholar] [CrossRef]
- Aditya, T.; Sugianto, A.; Sanjaya, A.; Susilo, A.; Zawani, H.; Widyawati, Y.S.; Amin, S. Channelling participation into useful representation: Combining digital survey app and collaborative mapping for national slum-upgrading programme. Appl. Geomat. 2019, 1–16. [Google Scholar] [CrossRef]
- Pratomo, J.; Kuffer, M.; Martinez, J.; Kohli, D. Coupling uncertainties with accuracy assessment in object-based slum detections, case study: Jakarta, Indonesia. Remote Sens. 2017, 9, 1164. [Google Scholar] [CrossRef] [Green Version]
- Kohli, D.; Stein, A.; Sliuzas, R. Uncertainty analysis for image interpretations of urban slums. Comput. Environ. Urban Syst. 2016, 60, 37–49. [Google Scholar] [CrossRef]
- Wurm, M.; Taubenböck, H. Detecting social groups from space—Assessment of remote sensing-based mapped morphological slums using income data. Remote Sens. Lett. 2018, 9, 41–50. [Google Scholar] [CrossRef]
- de Albuquerque, J.P.; Yeboah, G.; Pitidis, V.; Ulbrich, P. In Towards a participatory methodology for community data generation to analyse urban health inequalities: A multi-country case study. In Proceedings of the 52nd Hawaii International Conference on System Sciences, Maui, HI, USA, 8–11 January 2019; pp. 3926–3935. [Google Scholar]
- Githira, D.N. Growth and Eviction of Informal Settlements in Nairobi; University of Twente Faculty of Geo-Information and Earth Observation (ITC): Enschede, The Netherlands, 2016. [Google Scholar]
- Kuffer, M.; Pfeffer, K.; Sliuzas, R.; Baud, I.; van Maarseveen, M. Capturing the Diversity of Deprived Areas with Image-Based Features: The Case of Mumbai. Remote Sens. 2017, 9, 384. [Google Scholar] [CrossRef] [Green Version]
- Gevaert, C.M.; Persello, C.; Elberink, S.O.; Vosselman, G.; Sliuzas, R. Context-Based Filtering of Noisy Labels for Automatic Basemap Updating From UAV Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2731–2741. [Google Scholar] [CrossRef]
- Leyk, S.; Gaughan, A.E.; Adamo, S.B.; de Sherbinin, A.; Balk, D.; Freire, S.; Rose, A.; Stevens, F.R.; Blankespoor, B.; Frye, C.; et al. The spatial allocation of population: A review of large-scale gridded population data products and their fitness for use. Earth Syst. Sci. Data 2019, 11, 1385–1409. [Google Scholar] [CrossRef] [Green Version]
- World Bank. Productive and Inclusive Cities for an Emerging Congo (English). In Democratic Republic of Congo Urbanization Review: Directions in Development; Environment and Sustainable Development; World Bank Publications: Washington, DC, USA, 2017. [Google Scholar]
- Jochem, W.C.; Bird, T.J.; Tatem, A.J. Identifying residential neighbourhood types from settlement points in a machine learning approach. Comput. Environ. Urban Syst. 2018, 69, 104–113. [Google Scholar] [CrossRef]
- OpenStreetMap contributors. Residential Network and Building Footprints Data for the Democratic Republic of Congo; the OpenStreetMap Foundation (OSMF): Cambridge, UK, 2018. [Google Scholar]
- Thomson, D.R.; Stevens, F.R.; Ruktanonchai, N.W.; Tatem, A.J.; Castro, M.C. GridSample: An R package to generate household survey primary sampling units (PSUs) from gridded population data. Int. J. Health Geogr. 2017, 16, 25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brown, T.A. Confirmatory Factor Analysis for Applied Research; Guilford: New York, NY, USA; London, UK, 2006. [Google Scholar]
- Grippa, T.; Lennert, M.; Beaumont, B.; Vanhuysse, S.; Stephenne, N.; Wolff, E. An Open-Source Semi-Automated Processing Chain for Urban Object-Based Classification. Remote Sens. 2017, 9, 358. [Google Scholar] [CrossRef] [Green Version]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Georganos, S.; Grippa, T.; Lennert, M.; Johnson, B.A.; Vanhuysse, S.; Wolff, E. SPUSPO: Spatially Partitioned Unsupervised Segmentation Parameter Optimization for Efficiently Segmenting Large Heterogeneous Areas. In Proceedings of the 2017 Conference on Big Data from Space (BiDS’17), Toulouse, France, 28–30 November 2018; pp. 28–30. [Google Scholar]
- Georganos, S.; Grippa, T.; Lennert, M.; Vanhuysse, S.; Johnson, B.A.; Wolff, E. Scale Matters: Spatially Partitioned Unsupervised Segmentation Parameter Optimization for Large and Heterogeneous Satellite Images. Remote Sens. 2018, 10, 1440. [Google Scholar] [CrossRef] [Green Version]
- Grippa, T.; Georganos, S.; Zarougui, S.; Bognounou, P.; Diboulo, E.; Forget, Y.; Lennert, M.; Vanhuysse, S.; Mboga, N.; Wolff, E. Mapping Urban Land Use at Street Block Level Using OpenStreetMap, Remote Sensing Data, and Spatial Metrics. ISPRS Int. J. Geo Inf. 2018, 7, 246. [Google Scholar] [CrossRef] [Green Version]
- Graesser, J.; Cheriyadat, A.; Vatsavai, R.R.; Chandola, V.; Long, J.; Bright, E. Image based characterization of formal and informal neighborhoods in an urban landscape. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2012, 5, 1164–1176. [Google Scholar] [CrossRef]
- Engstrom, R.; Sandborn, A.; Yu, Q.; Burgdorfer, J.; Stow, D.A.; Weeks, J.; Graesser, J. Mapping Slums Using Spatial Features in Accra, Ghana. In Proceedings of the Joint Urban Remote Sensing Event (JURSE), Lausanne, Switzerland, 30 March–1 April 2015; pp. 1–4. [Google Scholar]
- Engstrom, R.; Pavelesku, D.; Tanaka, T.; Wambile, A. In Mapping Poverty and Slums Using Multiple Methodologies in Accra, Ghana. In Proceedings of the 2019 Joint Urban Remote Sensing Event (JURSE), Vannes, France, 22–24 May 2019; pp. 1–4. [Google Scholar]
- Engstrom, R.; Newhouse, D.; Haldavanekar, V.; Copenhaver, A.; Hersh, J. In Evaluating the Relationship between Spatial and Spectral Features Derived from High Spatial Resolution Satellite Data and Urban Poverty in Colombo, Sri Lanka. In Proceedings of the 2017 Joint Urban Remote Sensing Event (JURSE), Dubai, UAE, 6–8 March 2017; pp. 1–4. [Google Scholar]
- Engstrom, R.; Hersh, J.S.; Newhouse, D.L. Poverty from Space: Using High-Resolution Satellite Imagery for Estimating Economic Well-Being; Strategic Research Program (SRP): Washington, DC, USA, 2017. [Google Scholar]
- Engstrom, R.; Harrison, R.; Mann, M.; Fletcher, A. In Evaluating the Relationship Between Contextual Features Derived from Very High Spatial Resolution Imagery and Urban Attributes: A Case Study in Sri Lanka. In Proceedings of the 2019 Joint Urban Remote Sensing Event (JURSE), Vannes, France, 22–24 May 2019; pp. 1–4. [Google Scholar]
- Karnataka Slum Development Board. Slum Details. Available online: http://ksdb.kar.nic.in/slums.asp (accessed on 10 January 2018).
- Roy, D.; Lees, M.H.; Pfeffer, K.; Sloot, P.M.A. Spatial segregation, inequality, and opportunity bias in the slums of Bengaluru. Cities 2018, 74, 269–276. [Google Scholar] [CrossRef]
- Szegedy, C.; Wei, L.; Yangqing, J.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. In Going Deeper with Convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Farabet, C.; Couprie, C.; Najman, L.; LeCun, Y. Learning Hierarchical Features for Scene Labeling. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1915–1929. [Google Scholar] [CrossRef] [Green Version]
- Persello, C.; Stein, A. Deep Fully Convolutional Networks for the Detection of Informal Settlements in VHR Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2325–2329. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Convolutional Neural Networks for Large-Scale Remote-Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 645–657. [Google Scholar] [CrossRef] [Green Version]
- Fu, G.; Liu, C.; Zhou, R.; Sun, T.; Zhang, Q. Classification for High Resolution Remote Sensing Imagery Using a Fully Convolutional Network. Remote Sens. 2017, 9, 498. [Google Scholar] [CrossRef] [Green Version]
- Bergado, J.R.; Persello, C.; Stein, A. Recurrent Multiresolution Convolutional Networks for VHR Image Classification. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6361–6374. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Kuffer, M.; Sliuzas, R.; Kohli, D. The exposure of slums to high temperature: Morphology-based local scale thermal patterns. Sci. Total Environ. 2019, 650, 1805–1817. [Google Scholar] [CrossRef] [PubMed]
- Stevens, F.R.; Gaughan, A.E.; Linard, C.; Tatem, A.J. Disaggregating Census Data for Population Mapping Using Random Forests with Remotely-Sensed and Ancillary Data. PLoS ONE 2015, 10, e0107042. [Google Scholar] [CrossRef] [Green Version]
- Kit, O.; Lüdeke, M.; Reckien, D. Defining the bull’s eye: Satellite imagery-assisted slum population assessment in Hyderabad, India. Urban Geogr. 2013, 34, 413–424. [Google Scholar] [CrossRef]
- Kotadiya, R.; Kuffer, M.; Sliuzas, R.V.; Patel, S. Post-Resettlement Socio-Economic Dynamics. In The Case of Ahmedabad, India; van Maarseveen, M.F.A.M., Martinez, J.A., Flacke, J., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 245–266. [Google Scholar]
- Patel, S.; Sliuzas, R.; Mathur, N. The risk of impoverishment in urban development-induced displacement and resettlement in Ahmedabad. Environ. Urban 2015, 27, 231–256. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Requirement | Description |
|---|---|
| Relating to area physical characteristics | Deprivation is defined by the neighborhood physical characteristics using the three levels of slum ontology [7]: Object, e.g.,
|
| Relating to area social characteristics | Deprivation is defined by the neighborhood social environment Social capital, e.g.,
|
| Context-dependent | Deprivation is related to the local context Local context
|
| Comparable across cities and countries | Global coverage
|
| Updated frequently with timely data | Frequent updates
|
| Protective of individual privacy and vulnerable populations | Deprived area maps are sufficiently detailed to support planning and monitoring but do not reveal exact locations of slums, informal settlements, and areas of inadequate housing
|
| Developed via an inclusive multi-stakeholder process | Deprived area maps should be customized to stakeholders, e.g.,
|
| Approach | Strengths |
|---|---|
| Aggregated slum household | The measure of household-level poverty
|
| Field-based mapping | Relating to both neighborhood-level social and physical characteristics
|
| Human imagery interpretation | Relating to neighborhood physical characteristics
|
| Machine imagery classification | Relating to neighborhood physical characteristics
|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuffer, M.; Thomson, D.R.; Boo, G.; Mahabir, R.; Grippa, T.; Vanhuysse, S.; Engstrom, R.; Ndugwa, R.; Makau, J.; Darin, E.; et al. The Role of Earth Observation in an Integrated Deprived Area Mapping “System” for Low-to-Middle Income Countries. Remote Sens. 2020, 12, 982. https://doi.org/10.3390/rs12060982
Kuffer M, Thomson DR, Boo G, Mahabir R, Grippa T, Vanhuysse S, Engstrom R, Ndugwa R, Makau J, Darin E, et al. The Role of Earth Observation in an Integrated Deprived Area Mapping “System” for Low-to-Middle Income Countries. Remote Sensing. 2020; 12(6):982. https://doi.org/10.3390/rs12060982
Chicago/Turabian StyleKuffer, Monika, Dana R. Thomson, Gianluca Boo, Ron Mahabir, Taïs Grippa, Sabine Vanhuysse, Ryan Engstrom, Robert Ndugwa, Jack Makau, Edith Darin, and et al. 2020. "The Role of Earth Observation in an Integrated Deprived Area Mapping “System” for Low-to-Middle Income Countries" Remote Sensing 12, no. 6: 982. https://doi.org/10.3390/rs12060982